
高齢者の自立生活を支えるパーソナルモビリティによる移動支援技術
少子高齢社会で活躍するIRT型ロボットの特徴は、家庭などでロボットと人が接近したり密着する点と、実環境やサイバーワールドの情報を積極的に利用する点です。そのコアになる科学技術の一つが、パーソナルモビリティを、体調や状況が変化しても自律的に動作を制御して、簡単な操作で安全快適に移動でき、ネットに接続された外部の情報を活用して、外出先や日常生活で有用な情報を提供する技術です。こうした技術によって、パーソナルモビリティを利用して、夜間でも安心して外出したり、読書をしながら通勤したり、知らない土地でも街の案内を聞きながら目的地まで移動したり、といったことが将来実現可能となります。
今回開発した技術は、パーソナルモビリティのための、(1)簡単な操作で操縦する技術、(2)外乱に対してロボットが自律的に運動を制御する技術、(3)複雑なマップを作成しなくとも位置を測定する技術、(4)自律移動によってロボットを制御・帰庫させる技術、(5)パノラマ画像による屋外との臨場感通信技術です。
発表するパーソナルモビリティは、現時点では、技術要素を開発・実証するプラットフォームとしての役割であり、最終的なロボットのデザインは社会の受容やニーズをもとに今後検討して変わっていくものです。
今回開発した技術は、パーソナルモビリティのための、(1)簡単な操作で操縦する技術、(2)外乱に対してロボットが自律的に運動を制御する技術、(3)複雑なマップを作成しなくとも位置を測定する技術、(4)自律移動によってロボットを制御・帰庫させる技術、(5)パノラマ画像による屋外との臨場感通信技術です。
発表するパーソナルモビリティは、現時点では、技術要素を開発・実証するプラットフォームとしての役割であり、最終的なロボットのデザインは社会の受容やニーズをもとに今後検討して変わっていくものです。
パーソナルモビリティ概要
パーソナルモビリティ(一人乗移動ロボット)による高齢者の自立生活を支援する技術の各機能と特徴
- 簡単な操作で操縦する技術屋外用モビリティーでは、人間の腕の回内・回外運動を操縦に利用し、前後方向に体重を支えつつ、かつ筋負担が少なく正確な操縦を可能にする操縦インタフェースを実現しました。屋内用モビリティーでは、搭乗者の重心位置や座面との接触状況などから操縦意図を推定し、手を使わずに体の動きだけで操縦する技術を開発しました。
- 外乱に対してロボットが自律的に運動を制御する技術倒立型の屋外用モビリティーにおいて、タイヤ、スイングアーム、シートスライダすべてを3次元物理モデルを用いて同時に制御することで、斜面や段差、凹凸がある場所でも安定して走行できる技術を開発しました。また搭載されたレーザレンジセンサにより周囲の人や障害物を認識し、動的に経路変更を行い衝突回避をする機能を実現しました。
- 複雑なマップを作成しなくとも位置を測定する技術室内用モビリティーでは、床模様に人の目には判別できない位置情報を埋め込んでおき、これを元に室内の指定された位置 へと移動する機能を実現しました。手招きしている人の位置を視覚により認識し、その人のそばに移動することができます。
- 自律移動によってロボットを制御・帰庫させる技術屋外用モビリティーでは、車庫の周辺でレーザレンジセンサを用いて周囲の地図を自動的に生成し、現在位置を推定する機 能および目的地へ障害物を避けて到達する経路を自動的に生成する機能を備えています。この機能により、搭乗者が乗り捨てたモビリティロボットが、自律的に車庫に帰還する機能を実現しました。
- パノラマ画像による屋外との臨場感通信技術屋内モビリティから屋外モビリティを遠隔操縦することで、部屋にいながらにして遠隔地の様子をパノラマ映像を通して高い臨場感で体験することができます。
パーソナルモビリティ実験機の構成
- [屋外用]
- 寸法: 高さ1000mm(乗降時)~1100mm(走行時)、幅700mm
重量: 150kg
走行性能:時速6km、登坂角10° (トヨタ自動車株式会社で開発したモビリティロボットをプラットフォームに使用しています。) - [屋内用]
- 寸法: 高さ1300mm x 幅660mm x 長さ640mm
重量: 45 kg

屋外用パーソナルモビリティ

屋内用パーソナルモビリティ
屋外用パーソナルモビリティ用操縦インタフェース腕の回内・回外運動を用い、体を支えつつ安全で正確な操縦が行えます。
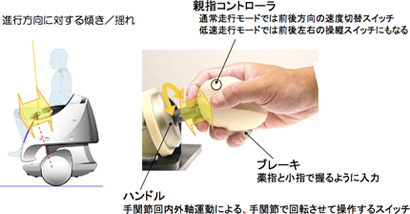
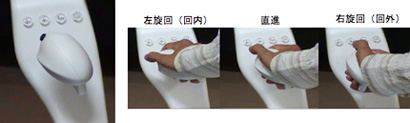
屋外用パーソナルモビリティ用操縦インタフェース腕の回内・回外運動を用い、体を支えつつ安全で正確な操縦が行えます。
屋外用パーソナルモビリティに実装したインタフェースデバイスとその操作
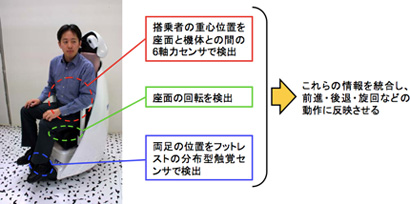
屋内用モビリティの操縦インタフェース
人が座っているかどうかを認識して、その搭乗者の重心位置や座面との接触状況などから操縦意図を推定し、体の動きだけで操縦できます。
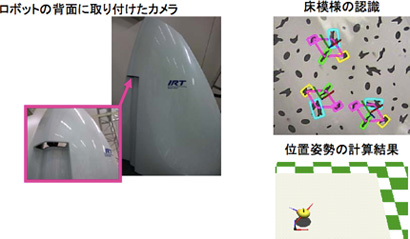
床模様を利用した位置認識技術
床に印刷された模様を認識し、模様の見え方からロボットの現在位置を取得します。
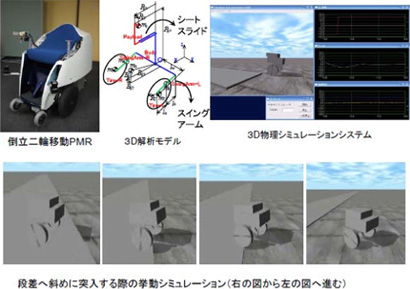
倒立二輪移動制御技術3次元物理モデルを用いて制御することで、斜面や段差、凹凸がある場所でも安定して走行できます。
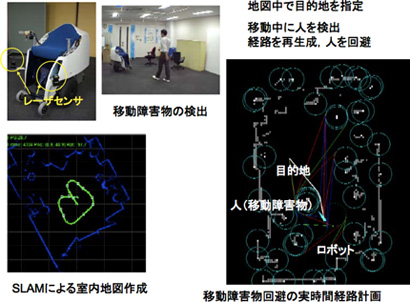
動的障害物回避技術歩く人の動きにあわせて、経路を計画し、障害物を回避しながら安全に移動します。

人の手招きを認識する技術
手招きする人の位置を認識し、そのそばに近づいていきます。

パノラマ画像による屋外モビリティの臨場感遠隔操縦技術
3つのカメラから1枚のパノラマ画像を生成し、人と同じ広い視野の映像を屋内のパーソナルモビリティ操縦者に送ることで、臨場感のある遠隔操縦を行えます。