
キッチンロボットにより食器洗いを支援する技術
食器の後片付けは、主に「食器の運搬(下膳)」「残り物処理」「食器洗い」「食器収納」の4工程に分けられますが、今回開発した「食器を扱う技術」は、全ての工程で必要とされる重要な要素技術であり、この技術によって、今回発表する食器洗い支援だけではなく、食器収納などでさらに多くの工程を自動化することが可能となります。
今回開発した「食器を扱う技術」は、主に(1)多種センサ情報の実時間フィードバック制御技術と、(2)MEMS触覚センサ及び多種センサ埋込エンドエフェクタによる手探りマニピュレーション技術によって構成されています。
「食器を扱う技術」の概要
1. 多種センサ情報の実時間フィードバック制御技術
食器等の物体をロボットが壊さないように扱うためには、多種のセンサから送られる感覚情報に瞬時に反応して動作を修正できることが必要となります。素早い応答を実現する方法として、ある感覚情報が得られた時に反射的 に決められた動作を行うようにプログラミングする構成法がありますが、動作を支配する系が頻繁に入れ替わるので、片付け作業のように高次の目標を達成するような行動を記述することは困難です。食器片付けのような作業目標のある動作には、注目すべき感覚情報は限られているため、動作を支配する作業進行役が必要に応じて感覚情報を並列的に監視させ、情報を集めながら行うべき動作を判断する方法が有効となります。単純かつ早い応答が必要な処理は別スレッドで並列に処理し、メインスレッドで時間的、空間的に広い範囲の情報から総合的な判断を行い、適切な動作を計画することで、複雑な作業を実現するためのソフトウェア構成法を開発しました。2.MEMS触覚センサ及び多種センサ埋込エンドエフェクタによる手探りマニピュレーション技術
多種のセンサを埋め込んだエンドエフェクタによって、個々のセンサの特性を活かして食器を手探りで扱うマニピュレーション技術を実現しました。ロボットが食器に触れる前は、近接覚センサにより物体の表面情報を取得し、触れてからは圧力センサ及びMEMS触覚センサにより力情報を得ます。従来は力情報の取得は手首の6軸力センサを用いていましたが、ハンドの動きと重量の影響で誤差が大きく、正確な動作に悪影響を及ぼす要因となっていました。MEMS触覚センサは、垂直方向及びせん断方向の力を計測できるもので、握力を調整しながら把持物体の滑りの制御や押し付け力を調整して物体の表面をなぞるような動作が可能となります。MEMS触覚センサは、2mm角の超小型MEMS3軸触覚センサチップを柔軟なゴム材料に埋め込んだものです。センサチップ1つあたり最小で0.3gの重さが測れる高感度なものを東京大学とパナソニック株式会社が共同開発し、経済産業省が主催する「今年のロボット」大賞2008優秀賞を受賞しました。参考:http://www.robotaward.jp/prize/01/

(1)多種センサ情報の実時間フィードバック制御技術
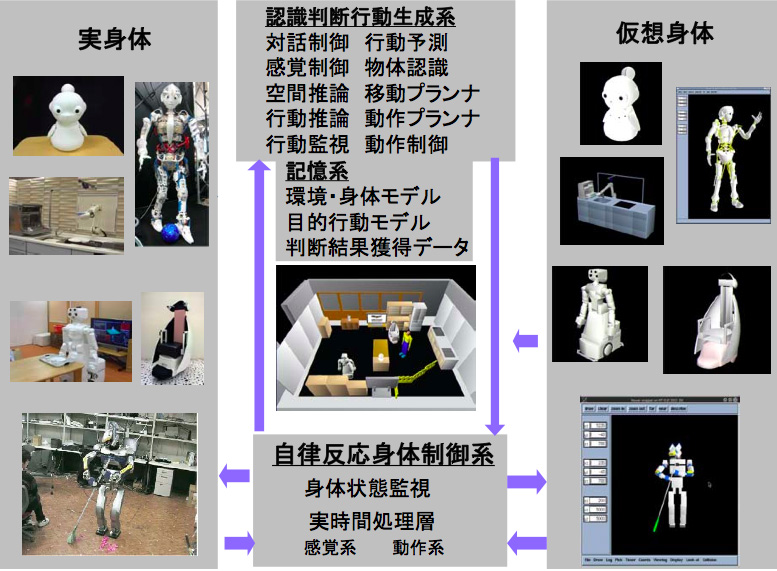
1-1) ロボットを記述し認識行動制御を行なうソフトウェア
多種のロボットの仮想身体形状,構造,感覚系,動作系を記述する仮想身体とその実身体の両方を共通に操作する高機能記述ソフトウェア環境.高機能ソフトウェアと実時間制御システムとの連携機能を備えたIRT基盤ソフトウェア環境
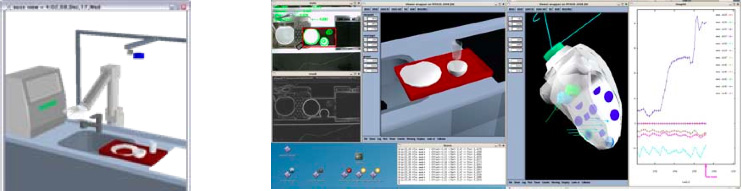
1-2) ロボット行動シミュレーション及びオンラインモニタリング環境
手探りマニピュレーションにおける,動作シミュレーションと感覚情報を可視化しオンラインでモニタリングするシステム記述例
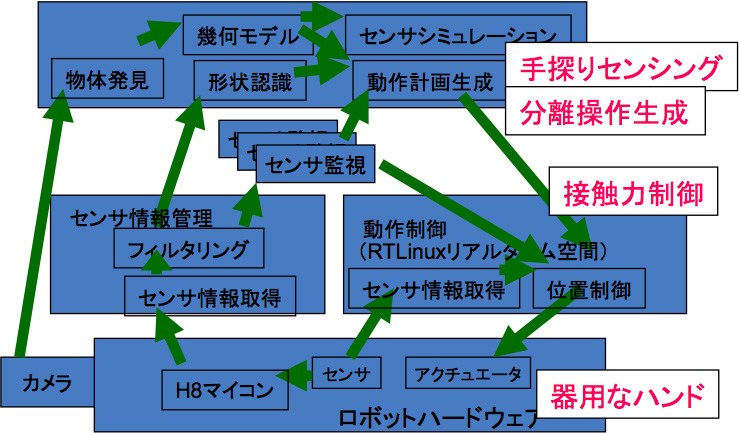
1-3) 多種センサ情報の実時間フィードバック制御のためのシステム構成
メモリ自動管理機能を備えた環境・行動の三次元モデルを利用する高レベル処理記述層と,ロボット身体上の多種センサ情報に基づく感覚動作の実時間処理記述層を連携可能な形で統合し,高レベルの実時間フィードバック制御が可能
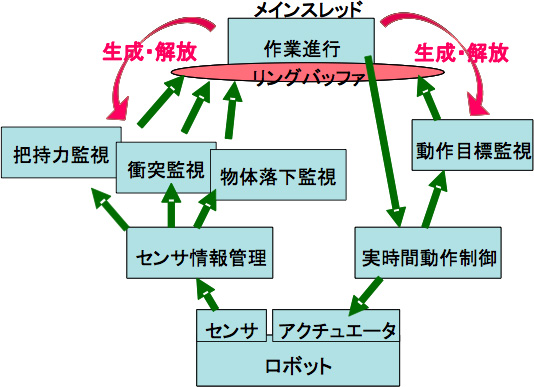
1-4) 動作実行中の並列監視処理スレッドの生成解放構造
行動シミュレーション,動作感覚系オンラインモニタリング機能を備えたIRT基盤ソフトウェアにおける,動作実行中にさまざまな監視機能を必要に応じて生成管理する機能
(2)MEMS触覚センサ及び多種センサ埋込エンドエフェクタによる手探りマニピュレーション技術
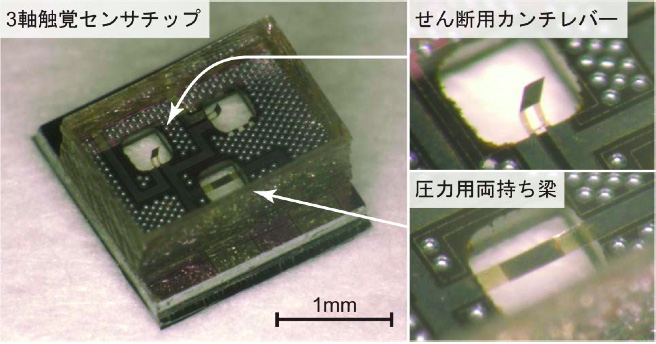
2-1) MEMS触覚センサ
直立したピエゾ抵抗カンチレバーを柔軟ゴム材料に埋めた超小型MEMS3軸触覚センサチッフ
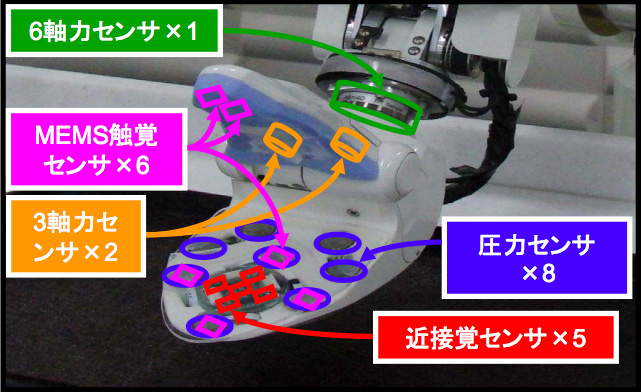
2-2) 多種センサ埋め込みエンドイフェクタ

(技術解説資料)
2-3) 標準食器の手探りマニピュレーション
食洗機用標準食器 : 透明なコップ,白いお椀と白い皿で、食洗機に何枚入るかを調べるための食器
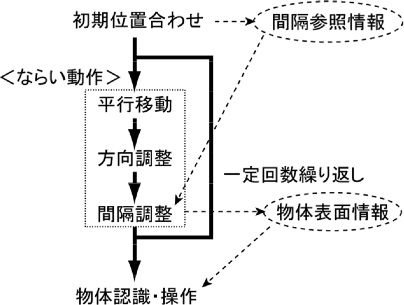
透明ガラス、反射などのため視覚では食器のおおよその初期位置のみを認識し、その後は手の感覚で手探りで確認をしながら食器を操作(マニピュレーション)する

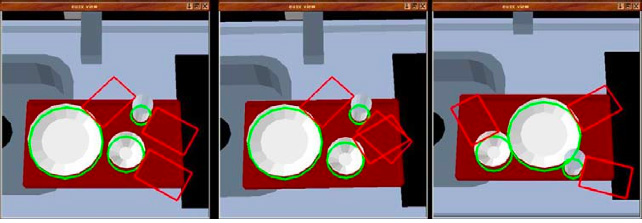
上から見たカメラ画像
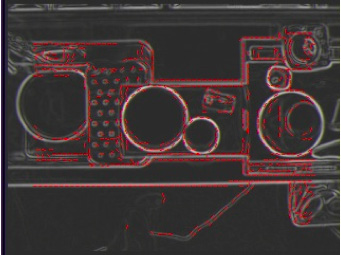
境界線の局所方向検出画像

トレイ領域内の標準食器の候補を検出
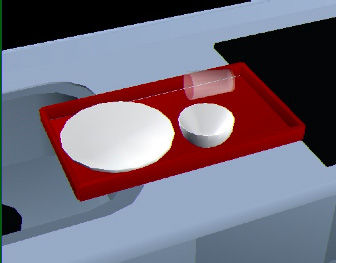
標準食器の幾何モデルの初期配置予想認識結果
2-3-2) 食器の把持アプローチ方向の計画
食器を把持するために手を近づけることが可能な方向を見つける
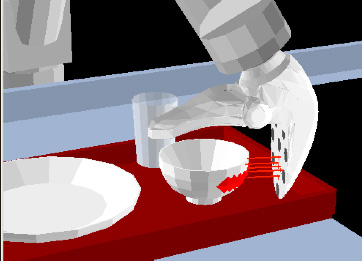
各近接覚センサの計測距離情報に応じて食器の表面に沿ってロボットを動かし、食器表面形状情報を獲得

2-3-4) 食器の高さ確認、把持確認、設置確認
各動作における各種埋め込みセンサの利用: 接触アプローチ(左)、把持確認(中)、把持物体ごしの設置確認(右)
2-3-5)3種類の標準食器を食洗機へしまい、食洗機を操作する

食器配置認識

お椀を確認

お椀を把持

お椀をすすぐ

お椀を置く

次を見る

コップへ近づく

コップを置く

皿へ近づく

皿を持ち上げる

皿を置く

トレイを押す

扉を閉める

スイッチを押す

完了・待機